边缘AI芯片重塑车载感知:摄像头模组采购如何跟上「芯模协同」新趋势
作者:admin
发布时间:2026-07-02 14:00:22
点击量:234
2026年6月,汽车芯片厂商 indie Semiconductor 发布了新一代边缘AI系统级芯片 iND881,专为车载摄像头感知系统设计,集成了NPU、DSP和四核ARM Cortex-A53 CPU,支持多路摄像头同时处理,HDR图像信号处理器延迟低于1毫秒。紧接着,indie 又在5月以4000万欧元收购了 ams OSRAM 的 CMOS 图像传感器产品线。
这两件事看似只是芯片圈的资本操作,但对摄像头模组采购和硬件工程师来说,释放了一个明确信号:车载感知正在从「模组适配芯片」走向「芯片定义模组」的新阶段。芯片厂开始自建传感器设计能力,模组厂必须理解芯片端的架构逻辑,才能在选型、打样和量产中不掉队。
这对采购意味着什么?我们从四个维度拆解这场变化背后的「坑」与「解法」。
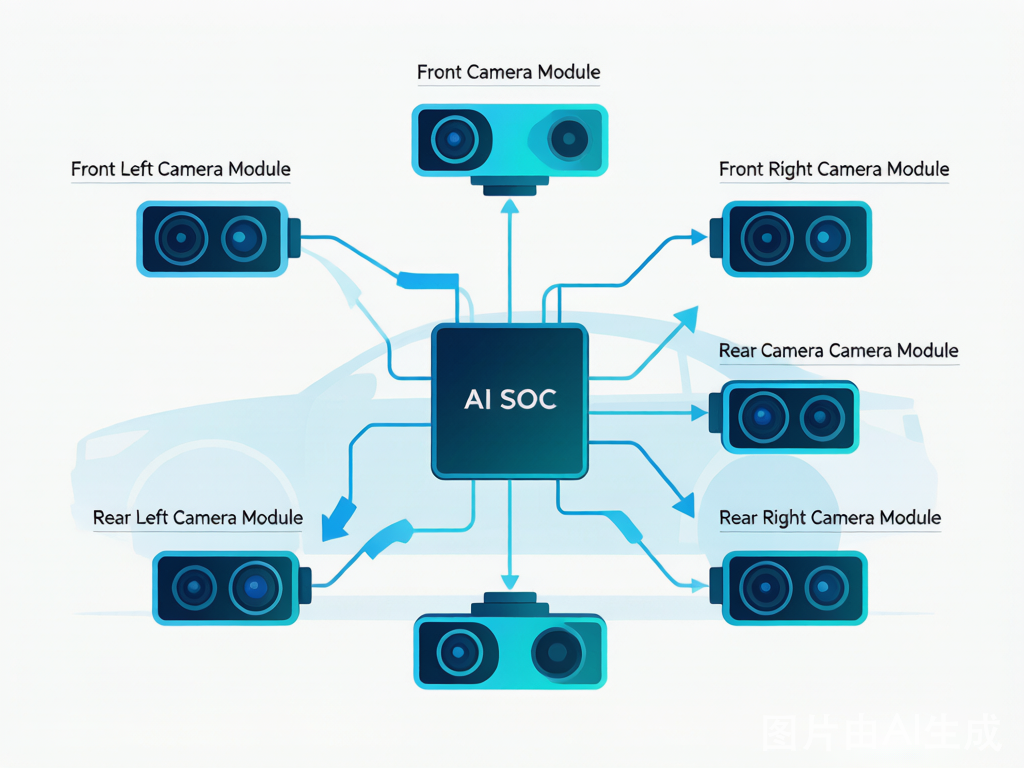
一、多路摄像头成为标配,模组一致性怎么保证?
坑在哪: iND881 这类芯片支持多通道视频同时输入,这意味着一台车可能挂6颗甚至8颗摄像头。很多采购沿用消费电子思维,每颗模组单独验收——单颗参数达标就放行。但车载场景要求的是「组内一致性」:6颗摄像头的白平衡、色彩还原、曝光响应必须高度一致,否则拼出来的环视画面会有明显的色差和亮度跳变。
怎么破: 在选型阶段就要向模组厂商提出「批次内一致性」指标。关键参数包括:传感器原始响应曲线的批次偏差、镜头畸变矫正后的残差范围、以及模组组装后的光学中心偏移量。靠谱的模组厂会提供每批次的 ATE(自动测试)分档数据,把模组按响应特性分档配对,确保同一台车的所有摄像头来自同一档位。这一步如果在量产前没谈好,后期靠软件标定去补,工程量会翻几倍。

二、HDR和低延迟不是芯片的独角戏,模组端要做什么?
坑在哪: iND881 的 HDR ISP 延迟低于1毫秒,听起来很厉害——但前提是模组端送进来的原始数据质量够高。很多采购只关注芯片规格书上的动态范围参数,忽略了模组端的镜头杂散光、传感器漏电流和 FPN(固定模式噪声)同样会吃掉动态范围。芯片算力再强,输入端是「脏数据」,输出照样是废片。
怎么破: 选模组时要重点看三个模组端指标:一是镜头的抗杂散光系数,这直接决定逆光场景下的鬼影水平;二是传感器的暗电流特性,影响高温环境下的信噪比;三是模组级的 FPN 校正能力,好的模组厂在出厂前会做逐颗的暗场校正,把 FPN 压到可接受范围。建议在打样阶段就要求模组厂提供高温(85°C以上)环境下的实拍样张,而不是只看常温参数表。
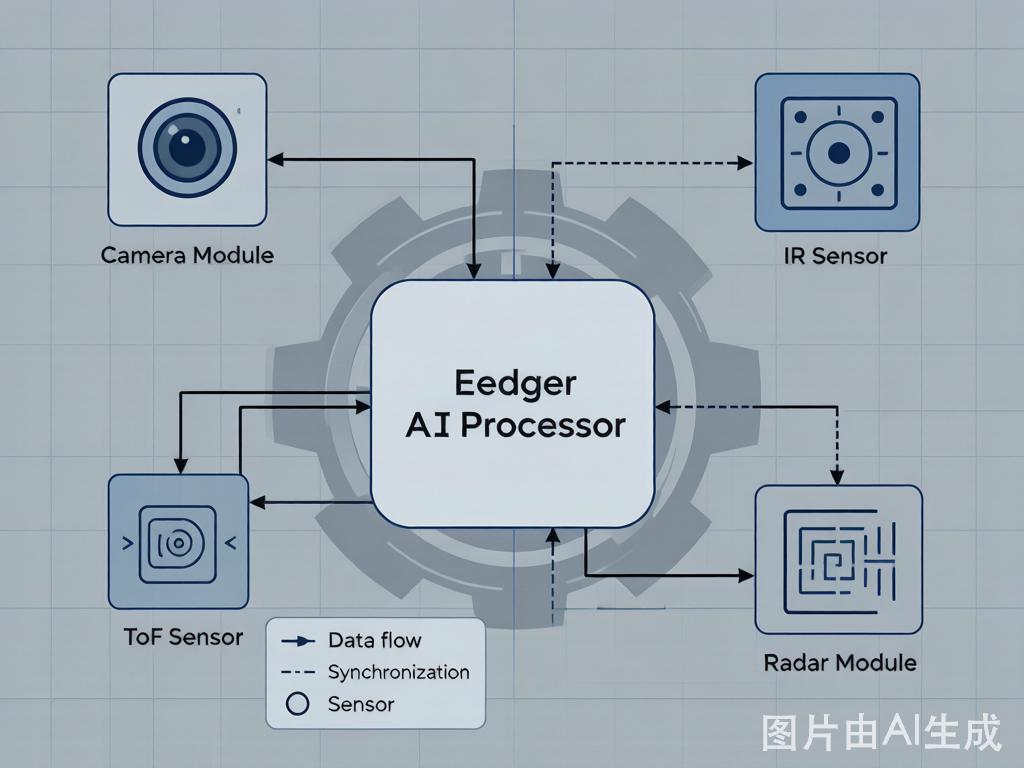
三、多传感器融合时代,模组接口设计怎么不被卡脖子?
坑在哪: iND881 支持摄像头、红外、热成像、ToF、雷达和激光雷达等多种传感器输入。这意味着摄像头模组不再是一个孤立的器件,而是整个感知系统中的一环。很多模组厂只懂做摄像头,不懂如何跟 ToF 或红外模组做物理层面的对齐和同步,导致集成时出现视差、时间不同步等问题。
怎么破: 选模组合作伙伴时,要关注其是否有「多模态模组」的设计经验。关键看几点:一是能否提供摄像头+ToF 的组合模组方案,物理同轴度有保障;二是是否具备硬件级同步触发能力,确保多颗模组的曝光时间戳对齐;三是模组厂的 FPC/FFC 设计能力,因为多传感器融合意味着更复杂的走线,信号完整性是量产阶段的常见坑。如果模组厂在这些方面有成熟案例,能省掉大量的集成调试时间。
四、芯片厂自建传感器,模组厂的位置会尴尬吗?
坑在哪: indie 收购 ams OSRAM 的 CMOS 传感器业务,意味着芯片厂开始向下游延伸。一些采购担心:如果芯片厂既做芯片又做传感器,模组厂是不是会被挤压?这种担忧有道理但不必过度——芯片厂做传感器是为了优化芯片与传感器的协同设计,而非替代模组厂。模组的核心价值在于光学组装、测试标定和量产一致性管控,这些是芯片厂不愿也做不好的重资产环节。
怎么破: 采购要转变思路,把模组厂看作「系统级集成伙伴」而非单纯的组装代工。具体做法:一是在项目早期就让模组厂参与芯片选型讨论,让其对芯片的 ISP 特性有深入理解,从而优化模组端的光学和传感器配置;二是要求模组厂具备根据芯片 ISP 特性做模组级参数调优的能力,比如针对特定 ISP 的 Demosaic 算法优化传感器滤色片阵列参数;三是关注模组厂的测试体系是否覆盖了「芯片-模组联调」验证,而不只是模组单体测试。
结语
边缘AI芯片的进化速度远超模组端的迭代节奏,这个落差正是采购和工程师最大的风险点。indie 的布局只是一个缩影——整个行业都在向「芯片定义感知、模组兑现性能」的方向走。金视康科技在摄像头模组领域深耕多年,覆盖消费电子、车载、安防、工业检测等场景,具备从选型建议到量产管控的全链路能力,能够帮助海外客户在「芯模协同」的新趋势下做出更稳妥的选型决策。





 13423810014
13423810014  0755-29433686
0755-29433686  daming@cameras-module.com
daming@cameras-module.com  深圳市宝安区石岩镇园岭村志泫翰工业园H栋2楼
深圳市宝安区石岩镇园岭村志泫翰工业园H栋2楼